Stop Using Proteus ARES !! Here is my EAGLE PCB tutoriels
Hello dears followers, Today i came with a new idea completly different of my usually published articles. I m not going to talk about a MCU or a program style. My global idea today is just like it showed in article's title '' let's stop using proteus ARES to make our PCB".

I have been doing a fair bit of PCB design work of late, and I always used to use Proteus for schematic drawing, sometimes simulating and PCB design. So why not to use some other software more professional ?
The idea was started with me since 3 years ago when i just noted that's there is a sofware named EAGLE Cadsoft more professional than Proteus specialy in making PCB Design.

So Today i m going to show you:
- How to install Eagle Cadsoft, Patch it to make it professional.
- How to update library in Eagle.
- How to make a simple project (schematic + PCB).
- How to make a advanced project (Schematic + Layout).
Before that let's just make a little comparison between Proteus and Eagle.

Proteus is an all in one product from schematics to board layout through to simulation on a high level. Eagle is schematics and board layout design software only, no practical simulation . They're very different products. Proteus is used in schools because somehow they've managed to sweetheart a deal for extremely low cost to free licensing on that level in hopes to net students into depending on it for their professional carers. Eagle is used because it uses industry standards, and although not as newbie friendly it is technically full featured, even the free version.
For it's function features and price, Eagle is the only real 'solution' out there. There are many other choices, all which will require a learning curve and design of new libraries for components.
There is a Lot of PCB creating Software, let's be honest and said that the big advantage of Proteus is Simulation part, but my article's title is about making pcb and here we have to be sure all of us that's Eagle is totaly better than Ares in this point.
Here is my graduation project 3 years ago maked using Eagle Cadsoft.

And here is the pcb

I m sure that's in making my PCB in ARES i found more than one problem specially when i search for component, many of them i was forced to created. Also library problem and, i could just in one word said thats ARES is LIMITED front of EAGLE.
Download and installing and patching Eagle.
All what you have to do is to click here to download your eagle professional version. CLICK ME.
A compressed file you will receive in few minutes.
- Run eagle-win-6.5.0.exe. (same file from official website)
- Click "Setup" and the installer will start.
- Run the installation and then select to "Run as Freeware". Installation completes.
- Start Cadsoft Eagle software. (Select "Run as Freeware" again if asked)
You will see "Control Panel - EAGLE 6.5.0 Light" as the title of the window.
- Open Cadsoft Eagle installtion directory and look for 'eagle.exe' (example: C:\Program Files (x86)\EAGLE-6.5.0\bin)
- Make a copy of "cadsoft.eagle.professional.6.5.0-patch.exe" in the directory in which 'eagle.exe' was found.
- Run "cadsoft.eagle.professional.6.5.0-patch.exe" as administrator.
- Click 'Patch' and you're done! You will receive a message in the patch software saying "---PATCHING DONE---"
- You can now delete "cadsoft.eagle.professional.6.5.0-patch.exe" from the Cadsoft Eagle installation directory.
- Start Cadsoft Eagle.
You will see "Control Panel - EAGLE 6.5.0 Professional" as the title of the window.
Here is a step by step video of how to download and to install it. Enjoy
Library Using and update.
I just put with my eagle a big library which include a big part of component, so when you open a new project and a new schematic inside it. Just click in Library and Click use and click all library included here: (example: C:\Program Files (x86)\EAGLE-6.5.0\lbr). That's it.
Make your own simple project in Eagle.
I m going to make the most famous and easy circuit in electronic which is 5V Regulation

The Layout Design will look like:

And here is a step by step Video demonstrate how i did it:
This circuit like he is known give us a regular ready 5V from a 12V.
MAX/RS232 TTL To Serial Interface inside Eagle.
This Circuit is so used in interfacing MCU with external world, many of developpement board just include this one and here the schematic:

The Layout:

And here a video of how i did this circuit and layout step by step.
2 Motor Control with L293D
L293D is Circuit able to control two DC motor with a variation in speed and direction, he is strongly used in robotic world.
here is the schematic :

And here is the Layout: (you could make better i just wanted to show how is easy to use straps)

Here the video:
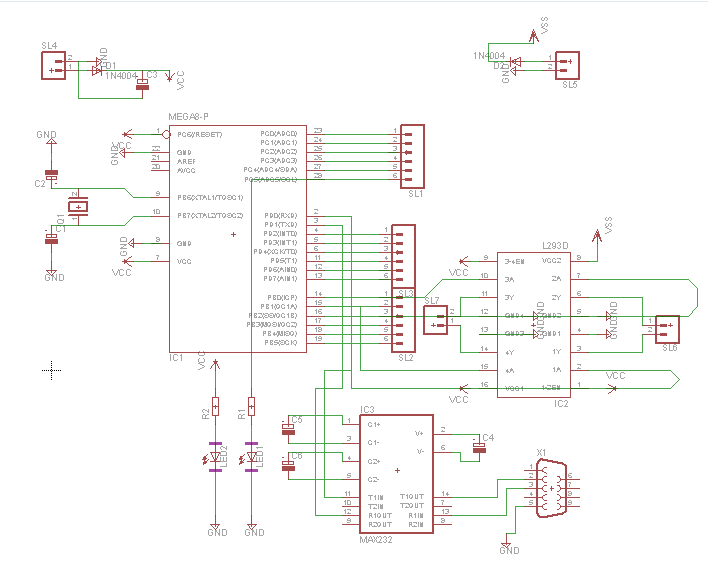
Make an advanced PCB Project inside Eagle.
This is the advanced project thats i m going to do. In fact it include an ATMEGA MCU, a connectors for all his digital pins, and a max232/rs232 interface, a motor control based in l293D so we could just said thats we are making a developpement board for our MCU.
and like always here a long video demonstrate how i did that.
Schematic
Layout

And here the video
See you soon, AYMEN LACHKHEM