How To Control Speed,Comportment,Direction Of a Stepper Motor Using Pic and Labview !!!
 Bonjour !!!
Bonjour !!!
Notre but c'est de savoir commander un moteur pas a pas bipolaire a l'aide d'une interface graphique faite sur Labview basée sur une communication série !!
Pour ceci on aura besoin:












Notre but c'est de savoir commander un moteur pas a pas bipolaire a l'aide d'une interface graphique faite sur Labview basée sur une communication série !!
Pour ceci on aura besoin:
Moteur pas à pas bipolaire
L297
L298
Pic 16F877A
Max 232
RS232
Alors pour comprendre le fonctionnement pas à pas on peut le décomposer en plusieurs etapes :
Le L297 est un circuit recommandé pour la commande et de contrôle de moteurs pas à pas unipolaire et même bipolaire.
En l'associant avec un driver double pont tel que le L298, l'ensemble jouent une interface parfaite pour la commande d'un moteur pas à pas bipolaire par microprocesseur ou micro contrôleur.
On peut contrôler un moteur pas à pas unipolaire avec un L297 en lui associant quatre transistors darlington ou mosfet.
On peut contrôler un moteur pas à pas unipolaire avec un L297 en lui associant quatre transistors darlington ou mosfet.
Le circuit de Control de moteur pas à pas L297 est recommandé pour être utilisé avec un circuit L298 ou L293E.
Il reçoit les signaux de contrôle venant d'unité de traitement qui est un pic a notre projet et la traduit en des signaux de forte puissances qui vont se communiquer avec le moteur.
Ce circuit inclue deux régulations à découpage type PWM (Pulse Width Modulation) pour réguler le courant de moteur.
De plus il est capable de toucher le comportement de moteur genre pas complète ou demi pas ou même un quart de pas .
Il reçoit les signaux de contrôle venant d'unité de traitement qui est un pic a notre projet et la traduit en des signaux de forte puissances qui vont se communiquer avec le moteur.
Ce circuit inclue deux régulations à découpage type PWM (Pulse Width Modulation) pour réguler le courant de moteur.
De plus il est capable de toucher le comportement de moteur genre pas complète ou demi pas ou même un quart de pas .
Le circuit intégré L298N est un étage de puissance (hacheur) spécialisée pour les moteurs àqui fonctionnent en courant continu.
Pour des moteurs bipolaires avec des courants de l'ordre de 2 A max dans les enroulements comme notre moteur ici le L297 doit accompagner L298N.
Pour des courants jusqu'à 1 A le hacheur L293 est recommandé fortement.
La carte électronique qu'on va réaliser elle doit contenir ces deux circuits intégrées avec un Pic 16F877A

Le Clock du circuit L297 est générée automatiquement avec le PIC sinon on pourra utilisée un timer NE555 pour réaliser cette tache.

Pour que la carte electronique qui fonctionne sous la technologie TTL (transistor transistor Logic) sera lisable sur l'ordinateur on doit insérer un convertisseur TTL/Série composée d'un max 232 et RS232 et quelques condensateurs.
Pour le test sur ISIS il suffit d’insérer un ("COMPIM") qui va jouer le rôle de ce circuit.
A propos du programme



char uart_rd;
void main()
{
TRISB = 0; //Makes PORTB0 or RB0 Output Pin
PORTB = 0;
UART1_Init(9600); // Initialize UART module at 9600 bps
Delay_ms(100); // Wait for UART module to stabilize
UART1_Write_Text("Start");
while(1) //Infinite Loop
{
PORTB.F0 = 1;
Delay_ms(250);
PORTB.F0 = 0;
Delay_ms(250);
if (UART1_Read() == ('e') ) {
PORTB.F2 = 0;
}
else {
PORTB.F2 = 1; }
if (UART1_Read() == ('a') ) {
PORTB.F3 = 1;
}
else {
}
if (UART1_Read() == ('b') ) {
PPORTB.F3 = 0;
}
else {
}
if (UART1_Read() == ('c') ) {
PPORTB.F4 = 0;
}
else {
}
if (UART1_Read() == ('d') ) {
PPORTB.F4 = 1;
}
else {
}
}}
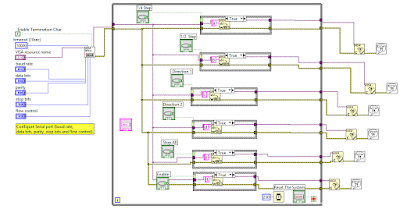
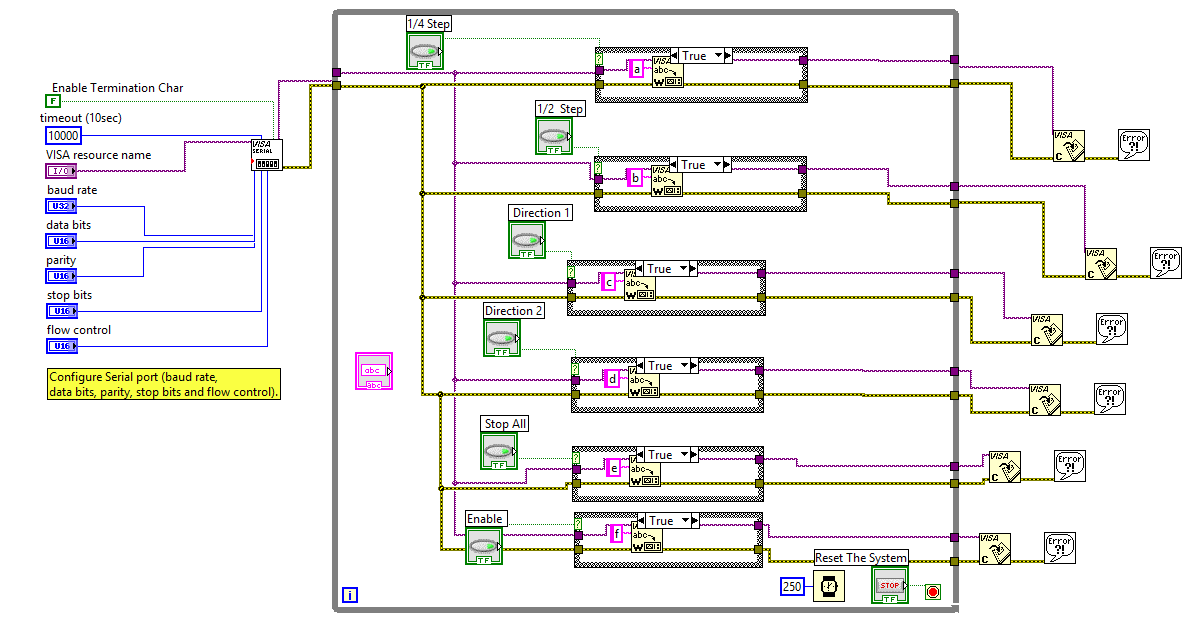
Maintenant a propos d'interface graphique sur Labview comme j'ai vous indiqué avant que il est divisé en deux parties que j'ai nommée Design et Praogram

Voila une vidéo démonstrative de fonctionnement de ce projet:


Vous pouvez télécharger tout le projet sur ce dossier :
 Télécharger le projet complet ici : https://drive.google.com/file/d/0B9EKWF9Q9HyvbE13VTlPeHZCNmc/view?usp=sharing
Télécharger le projet complet ici : https://drive.google.com/file/d/0B9EKWF9Q9HyvbE13VTlPeHZCNmc/view?usp=sharing
Télécharger le projet complet ici : https://drive.google.com/file/d/0B9EKWF9Q9HyvbE13VTlPeHZCNmc/view?usp=sharing





