STM32 F4 : PWM Timers

On commence par definir ces grandes protocoles électroniques :
On commence par definir ces grandes protocoles électroniques :
PWM
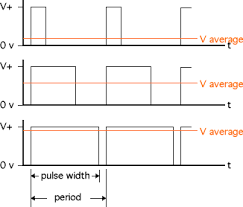
La modulation de largeur d'impulsions (MLI ; en anglais : Pulse Width Modulation, soit PWM), est une technique couramment utilisée pour synthétiser des signaux continus à l'aide de circuits à fonctionnement tout ou rien, ou plus généralement à états discrets.
Le principe général est qu'en appliquant une succession d'états discrets pendant des durées bien choisies, on peut obtenir en moyenne sur une certaine durée n'importe quelle valeur intermédiaire.
Ce phénomène est fortement recommandé pour assurer la variation de vitesse de moteur a courant continu, aujourd'hui je vais vous démontrer comment on peut générer un signal PWM déune STM32 et visualiser son présence sur des diodes LEDs.
Voici un exemple de comment on génére un signal PWM en se basant sur la couche Software de Mikro C for ARM et STM32F4:
//Let's Electronic By Aymen Lachkhem
// www.letselectronic.blogspot.com
// Hello in this tutoriel we are going to use 4 buttons (digital Input), the first two will increase and decrease the current duty for the
// first Led and the second two will make the same thing with the other Led.
unsigned int current_duty, old_duty, current_duty1, old_duty1;
unsigned int pwm_period1, pwm_period2;
void InitMain() {
GPIO_Digital_Input (&GPIOA_BASE, _GPIO_PINMASK_3 | _GPIO_PINMASK_4 | _GPIO_PINMASK_5 | _GPIO_PINMASK_6); // configure PORTA pins as input
}
void main() {
InitMain();
current_duty = 100; // initial value for current_duty
current_duty1 = 100; // initial value for current_duty1
pwm_period1 = PWM_TIM1_Init(5000);
pwm_period2 = PWM_TIM4_Init(5000);
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // Set current duty for PWM_TIM1
PWM_TIM4_Set_Duty(current_duty1, _PWM_NON_INVERTED, _PWM_CHANNEL2); // Set current duty for PWM_TIM4
PWM_TIM1_Start(_PWM_CHANNEL1, &_GPIO_MODULE_TIM1_CH1_PE9);
PWM_TIM4_Start(_PWM_CHANNEL2, &_GPIO_MODULE_TIM4_CH2_PD13);
while (1) { // endless loop
if (GPIOA_IDR.B3) { // button on RA3 pressed
Delay_ms(1);
current_duty = current_duty + 5; // increment current_duty
if (current_duty > pwm_period1) { // if we increase current_duty greater then possible pwm_period1 value
current_duty = 0; // reset current_duty value to zero
}
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // set newly acquired duty ratio
}
if (GPIOA_IDR.B4) { // button on RA4 pressed
Delay_ms(1);
current_duty = current_duty - 5; // decrement current_duty
if (current_duty > pwm_period1) { // if we decrease current_duty greater then possible pwm_period1 value (overflow)
current_duty = pwm_period1; // set current_duty to max possible value
}
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // set newly acquired duty ratio
}
if (GPIOA_IDR.B5) { // button on RA5 pressed
Delay_ms(1);
current_duty1 = current_duty1 + 5; // increment current_duty
if (current_duty1 > pwm_period2) { // if we increase current_duty1 greater then possible pwm_period2 value
current_duty1 = 0; // reset current_duty1 value to zero
}
PWM_TIM4_Set_Duty(current_duty1, _PWM_NON_INVERTED, _PWM_CHANNEL2); // set newly acquired duty ratio
}
if (GPIOA_IDR.B6) { // button on RA6 pressed
Delay_ms(1);
current_duty1 = current_duty1 - 5; // decrement current_duty
if (current_duty1 > pwm_period2) { // if we decrease current_duty1 greater then possible pwm_period1 value (overflow)
current_duty1 = pwm_period2; // set current_duty to max possible value
}
PWM_TIM4_Set_Duty(current_duty1, _PWM_NON_INVERTED, _PWM_CHANNEL2);
}
Delay_ms(1); // slow down change pace a little
}
}
Voici une démonstration vidéo de fonctionnement :
Aucun commentaire:
Enregistrer un commentaire