Voltage And Current Regulation !!
Bonsoir, aujourd'hui j'ai choisi de vous parler un peu de domaine de régulation de tension et de courant, Vu a l'importance de ce dernier domaine surtout a l'alimentation de différents composants électroniques,
Commençons tout d'abord par la notion de régulation de tension.
Un régulateur de tension en faite un élément capable d'assurer la stabilisation d'une tension à une tension bien fixe, et qui est obligatoire pour les montages électroniques qui ont besoin d'une valeur de tension qui est pas directement disponible. Un régulateur de voltage est parfois composé d'une collection de composants électroniques simple de base (résistances, diodes zener et transistor par exemple), mais il peut aussi être de type "intégré" ou "avancée" et contenir tout ce qu'il faut dans un seul et même boitier, pour rendre pratiquant son fonctionnement veuillez bien lire le reste de cet article.


LM = préfixe utilisé par le fabricant.
78 = signifie qu'il s'agit d'un régulateur positif.
79 = signifie qu'il s'agit d'un régulateur négatif.
xx = tension de sortie fixe et je dis bien fixe (valeur entière sur deux chiffres, par exemple "05" pour 5 V).
Valeurs courantes disponibles : 5 V, 6 V, 9 V, 10 V, 12 V, 15 V, 18 V, 24 V.



Les 1 A ou 1,5 A du bon vieux LM7812 ne suffisent pas ? Plusieurs solutions pour passer un ou deux crans au-dessus, vous pouvez :- utiliser un régulateur plus puissant;- ajouter un gros transistor à un régulateur;
Bonsoir, aujourd'hui j'ai choisi de vous parler un peu de domaine de régulation de tension et de courant, Vu a l'importance de ce dernier domaine surtout a l'alimentation de différents composants électroniques,
Commençons tout d'abord par la notion de régulation de tension.
Un régulateur de tension en faite un élément capable d'assurer la stabilisation d'une tension à une tension bien fixe, et qui est obligatoire pour les montages électroniques qui ont besoin d'une valeur de tension qui est pas directement disponible. Un régulateur de voltage est parfois composé d'une collection de composants électroniques simple de base (résistances, diodes zener et transistor par exemple), mais il peut aussi être de type "intégré" ou "avancée" et contenir tout ce qu'il faut dans un seul et même boitier, pour rendre pratiquant son fonctionnement veuillez bien lire le reste de cet article.
ce qui est demandé en faite du régulateur de tension est de fournir une tension constante pour n’importe quel courant de output quelque soit la charge. ceci est vrai seulement si votre régulateur est idéale présenté au figure si dessus. Alors quoi faire ?
Ceci c'est le décomposition interne d'un régulateur formé sur un simple circuit intégré.
La valeur output Vout sera autmatiquement comparée à une tension de référence fixe qui jouera le role de consigne Vref, par la boucle de contre réaction (feedback).
La sortie de comparateur touchera automatiquement la source de courant qui va polariser le transistor 'BALLAST" de façon de régler Vout.
Le moment ou la sortie de comparateur sera completement nul c'est le moment ou on a eu la tension de réference qu'on cherche.
La valeur output Vout sera autmatiquement comparée à une tension de référence fixe qui jouera le role de consigne Vref, par la boucle de contre réaction (feedback).
La sortie de comparateur touchera automatiquement la source de courant qui va polariser le transistor 'BALLAST" de façon de régler Vout.
Le moment ou la sortie de comparateur sera completement nul c'est le moment ou on a eu la tension de réference qu'on cherche.
Les régulateurs fixes sont appelés ainsi parce qu'ils ont été conçus pour fournir une tension continue d'une valeur donnée, qui est non modifiable. Il en existe de multiples sortes sous plein de catégories, la famille la plus célèbre ici c'est celle qui inclut la série LM78xx (ou uA78xx) et LM79xx (ou uA79xx).
Ils sont très simple à utiliser, et il suffit de peu de connaissances pour savoir le choix correct a utiliser,
leur nom indiquant de lui-même de quoi s'agit et de quel voltage j'aurai.
leur nom indiquant de lui-même de quoi s'agit et de quel voltage j'aurai.
LM = préfixe utilisé par le fabricant.
78 = signifie qu'il s'agit d'un régulateur positif.
79 = signifie qu'il s'agit d'un régulateur négatif.
xx = tension de sortie fixe et je dis bien fixe (valeur entière sur deux chiffres, par exemple "05" pour 5 V).
Valeurs courantes disponibles : 5 V, 6 V, 9 V, 10 V, 12 V, 15 V, 18 V, 24 V.
Alors le régulateur choisit va dépendre automatiquement de valeur demandé par la charge de circuit.
Exemple d'utilisation de ces derniers sur ISIS:
Exemple d'utilisation de ces derniers sur ISIS:

Comme ça se voit ici depuis le 15 V d'entrée j'ai fait sortir le 5v et 6v et le 8v et le 9v... .
Ce régulateur inclus une tension d'entré sur 2 pins et une autre de sortie sur deux pins et puisque une c'est la masse elle est commune ce régulateur possède 3 pins (IN,OUT,GND). ceci c'est pour le brochage de régulateur 78xx(tension postive) j'indique qu'il faut bien faire attention a propos du brochage de régulateur de tension négative vu que l'ordre des pins est different.Voila l'exemple de 8V positive et 9V négative.
Posons que je cherche a avoir une tension stable de 10V et je possède que de régulateur de 5V comment je fait ?
Ici j'ai besoin de rappeler l'utilité de la diode zener voici cette exemple
Ici j'ai besoin de rappeler l'utilité de la diode zener voici cette exemple
Pour avoir une tension de sortie de 10V, il est préférable d'insérer une diode zener de 5,1V entre borne "masse" d'un régulateur 5V et masse "réelle", comme le montre le schéma ci-dessus du coup la tension de sortie sera 5V venue de régulateur avec le 5.1V de diode zener donc 10.1v.
Les condensateurs que vous voyez de part et d'autre a coté de régulateur, Le choix de leur valeurs comment s'effectue ?

Condensateur C1 : c'est le condensateur responsable au filtrage,et qui permet de "lisser" les arches de sinusoïdes pour en obtenir une tension à peu près stable.
Condensateur C2 : ce condensateur sert à améliorer la stabilité du régulateur et permet une meilleur réponse aux transitoires.
Condensateur C4 régulateur fixe : ce condensateur additionnel et facultatif doit aussi être placé au plus près du régulateur de tension. Il sert à améliorer la stabilité du régulateur.
Condensateur C2 : ce condensateur sert à améliorer la stabilité du régulateur et permet une meilleur réponse aux transitoires.
Condensateur C4 régulateur fixe : ce condensateur additionnel et facultatif doit aussi être placé au plus près du régulateur de tension. Il sert à améliorer la stabilité du régulateur.
Condensateur C3 : ce condensateur le rôle de réservoir d'énergie pour la charge.Tout régulateur est capable de supporter une certaine tension sur ses poles d'entrées jusqu'à une valeur fixe bien determinée . De même, tout régulateur est capable de délivrer un courant maximal.
Les valeurs maximales spécifiées par les fabricants ne doivent pas vous laisser penser que l'on peut atteindre ces limites en toutes circonstances. Les limites d'utilisation sont liées aux contraintes thermiques surtout puisque l'energie dissipée par effet joule ici est proportionnelle au difference de tension entre la valeur d'entrée et de sortie.
posins que j'ai des forts courants au circuit mises et qu'il existe une grande séparation entre l'alimentation et la charge, la chute de tension sera si importante . Cette chute de tension peut être compensée par une méthode dite "4 pins",

Une autre probléme s'effectue a l'utilisation de ce genre de régulateur c'est l'intervalle de courant équipée avec la tension de sortie alors
Les 1 A ou 1,5 A du bon vieux LM7812 ne suffisent pas ? Plusieurs solutions pour passer un ou deux crans au-dessus, vous pouvez :- utiliser un régulateur plus puissant;- ajouter un gros transistor à un régulateur;
- mettre plusieurs régulateurs en parallèle.
Au cas ou on va se baser sur la première solution il faut bien choisir le régulateur en prenant en compte la valeur de courant ou la capacité de courante qui est capable a fournir.
Au cas ou on va gonfler le courant de sortie il faut utiliser un transistor qui va dépendre de chemins demandée par exemple ce circuit là

L'application simple de loi de noeud ici va vous expliquer comment simplement on peut ajouter un courant au courant de sortie du coup j'ai gonfler le courant de sortie.
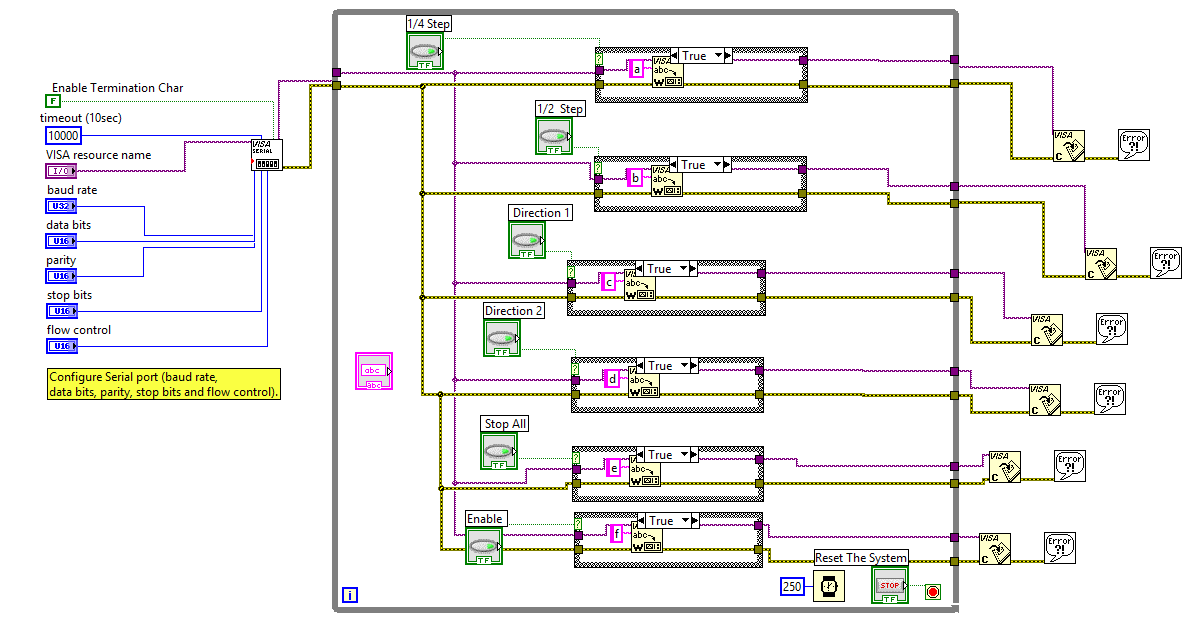
Exemple alimentation 12V 5A exellente avec les moteurs pas à pas si dessous:

Article crée et traité par : Houssem Ben Hammadi.
L'application simple de loi de noeud ici va vous expliquer comment simplement on peut ajouter un courant au courant de sortie du coup j'ai gonfler le courant de sortie.
Exemple alimentation 12V 5A exellente avec les moteurs pas à pas si dessous:
Article crée et traité par : Houssem Ben Hammadi.